by Rain Chu | 12 月 25, 2025 | AI, Chat, 數據分析
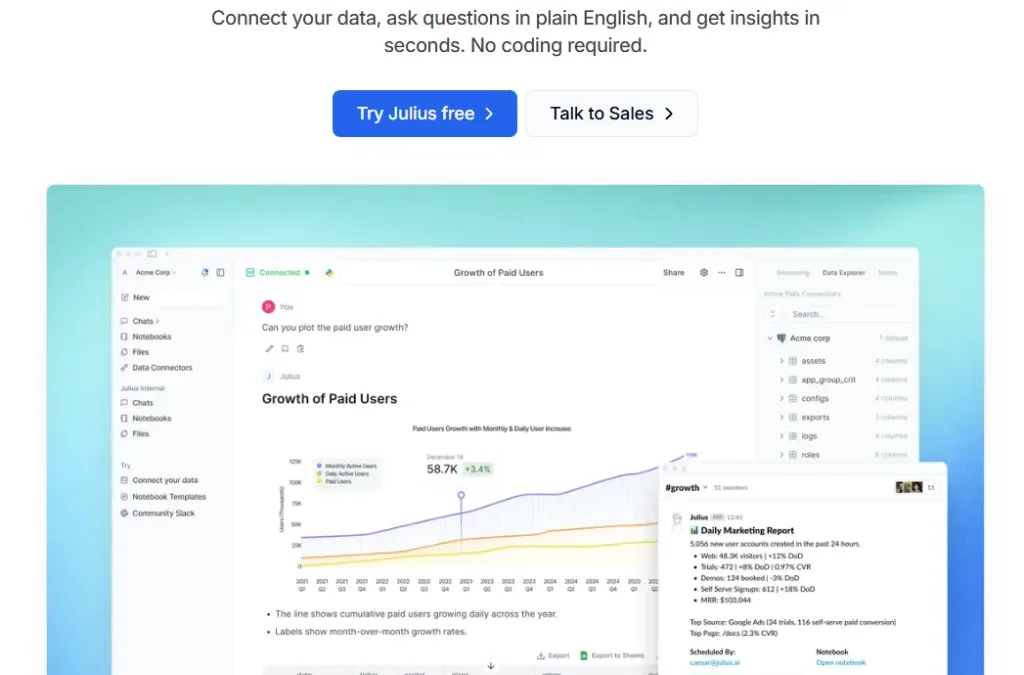
Data Analyst(資料分析師)與企業決策者每天都要面對大量數據,但不是每個人都具備寫程式、操作複雜分析工具的能力。這正是 Julius AI 誕生的原因——讓你不用寫程式,只要用英文問問題,就能在幾秒鐘內獲得洞察。

什麼是 Julius AI?
Julius AI 是一款以 Data AI 為核心的智慧資料分析平台。使用者只需上傳資料(例如 CSV、Excel、Google Sheets),就可以像聊天一樣,用自然語言詢問問題:
- 「哪一個產品的成長率最高?」
- 「請幫我畫出近三年的營收趨勢圖」
- 「這份資料中有沒有異常值?」
Julius AI 會即時理解你的問題,並自動完成分析、計算與視覺化,讓資料真正「開口說話」。
Julius AI 的核心特色
1️⃣ 連接你的資料,立刻開始分析
Julius AI 支援多種常見資料格式,無論是試算表還是資料表,都能快速上傳並使用,完全不需要事前建模或設定複雜流程。
2️⃣ 用白話英文提問,不需要寫程式
最大的亮點在於 No Coding Required。你不必懂 Python、SQL 或 R,只要用英文描述你的需求,Julius AI 就能自動完成背後的資料分析邏輯。
3️⃣ 幾秒鐘內產生洞察與圖表
從資料清理、分析到圖表生成,Julius AI 幾乎都是即時完成,非常適合需要快速決策的商業場景。
4️⃣ 為 Data Analyst 與非技術人員量身打造
不論你是專業的 Data Analyst,還是行銷、產品、營運人員,Julius AI 都能降低資料分析門檻,讓更多人能參與數據決策。
Julius AI 可以用在哪些情境?
- 📊 商業決策分析:快速找出銷售趨勢與關鍵指標
- 📈 行銷成效評估:分析活動轉換率與使用者行為
- 🧠 教育與研究:協助學生與研究人員理解資料結構
- 🏢 新創與中小企業:沒有專屬 Data Team 也能做專業分析
為什麼 Julius AI 值得關注?
在過去,資料分析往往意味著「高技術門檻」與「長時間準備」。Julius AI 將 Data AI 與自然語言處理結合,讓資料分析變得更直覺、更民主化。
對 Data Analyst 來說,它能加快工作流程;對非技術背景的使用者來說,則是一條直接進入數據世界的捷徑。
官方網站
👉 https://julius.ai/

by Rain Chu | 9 月 14, 2025 | AI, Robot, 數據分析, 模型
建立自己的 HopeJR 機器人!
你有想要一隻能做精密手部操作的人形機器人?
HopeJR 正是這樣一款開源專案:具備人手與機械手臂,搭配外骨骼(exoskeleton)與手套控制,能實現靈巧、精確的手部動作,非常適合高階操作任務。
以下帶大家從硬體到軟體,完整建立 HopeJR 的流程教學與心得。
HopeJR 是什麼?
- HopeJR 是舉債於 LeRobot 專案下的一款開放源碼人型機械手臂與手的系統。使用者可以以手套與外骨骼裝置控制 HopeJR 的手與手臂動作。
- 它包含幾個模組化的部分:機械手、機械臂、手套(glove)、外骨骼(exoskeleton)控制器。硬體、軟體皆為開源。
建置 HopeJR 教學
以下是步驟示範,讓你從零開始組裝與操作 HopeJR。
一、環境與先決條件
- 有外骨骼與手套控制器(homunculus_glove/homunculus_arm 等)
- 有機械手與機械手臂硬體模組
- 一台能連接這些裝置的電腦,USB 接口、驅動支援
- 安裝 Python 3.10+,PyTorch 等軟體環境,以及 LeRobot 套件
二、安裝 LeRobot 套件
git clone https://github.com/huggingface/lerobot.git
cd lerobot
pip install -e ".[hopejr]"
三、設備端與通訊埠設定(Device Configuration)
- 使用
lerobot-find-port 指令來找出每個 HopeJR 組件(手臂、手、手套、外骨骼控制器)的 USB 埠。
- 記錄每個模組對應的 port,例如
/dev/tty.usbmodemXXXX 或 Windows 上的類似 COM 埠,用於後續校正和遙控。
四、校正(Calibration)
為了讓控制更加精確,你必須為每個組件做校正:
- 手(Hand)校正:把手指關節全部移動至可動範圍,設定最小/最大角度。
- 手套(Glove)校正:同樣地,移動手套中每根手指的所有關節,記錄該裝置讀值的最小與最大。
- 手臂(Arm)校正:肩膀、手肘、手腕的 pitch/yaw/roll 等關節都要校正動作範圍。
- 外骨骼(Exoskeleton)校正:這部分讓人手動作透過外骨骼映射到 HopeJR 的機械手臂,在校正時要移動所有關節達到最大與最小。
校正結果會保存在本地,例如 ~/.cache/huggingface/lerobot/calibration/... 的路徑內。
五、遠端操作(Teleoperation)
校正完成後,就能使用遙控命令讓你手與手臂控制 HopeJR 機械手部分動作:
lerobot-teleoperate \
--robot.type=hope_jr_hand \
--robot.port=<手的 USB 埠> \
--robot.id=blue \
--robot.side=right \
--teleop.type=homunculus_glove \
--teleop.port=<手套 USB 埠> \
--teleop.id=red \
--teleop.side=right \
--display_data=true \
--fps=30
對手臂同樣使用遠端操作命令,只是 robot.type 填 hope_jr_arm,teleop.type 用 homunculus_arm。
六、錄製、重放與訓練(Record/Replay/Train)
- Record:錄製你用手套/外骨骼控制手部或手臂的操作數據,配合影像或鏡頭視訊。這些資料可以用來訓練模型。
- Replay:重放之前錄製的數據,測試操作是否準確。
- Train:若你想讓你的 HopeJR 有自主行為或能在某些動作上優化,可以用 LeRobot 的訓練指令,搭配錄製的資料或模擬環境進行強化學習或 imitation learning。
HopeJR 的優勢與適用場景
| 優勢項目 | 說明 |
|---|
| 精準控制 | 外骨骼 + 手套 + 校正過程能實現手指、手腕、肩肘等關節的細緻動作。 |
| 模組開源 | HopeJR 所有硬體與軟體部分為開源,可以自行組裝或改裝。 |
| 適合高階任務 | 適用於需要精細手部操作的任務,例如物件操作、握持/擺動、復健機器人等。 |
| 社群與生態支持 | LeRobot 有模型、範例、文檔與活躍社群可協助新手入門。 |
延伸閱讀
官網:
https://github.com/huggingface/lerobot
說明:
https://huggingface.co/docs/lerobot/hope_jr
硬體教學:
https://huggingface.co/docs/lerobot/so101
by Rain Chu | 8 月 30, 2025 | AI, 圖型處理, 數據分析
LaneSOD 是一套基於 InSPyReNet(逆向顯著性金字塔重建網路)而延伸出的開源模型,專門針對車道線分割(Lane Segmentation),應用於駕駛場景的 AI 視覺處理中。透過強大的顯著性檢測技術,LaneSOD 能精準辨識道路上的車道線,具備高準確度與可用性。
一、什麼是 LaneSOD?
- 核心技術:LaneSOD 架構於 InSPyReNet,後者是一種高解析度顯著性物件偵測模型,於 ACCV 2022 上提出,專門處理高解析度圖片的顯著性檢測,使用金字塔結構融合多階層特徵提高精度。
- 執行場景:LaneSOD 適用於駕駛視角的車道識別,尤其在多車道或複雜光線下仍能穩定運作,是自駕輔助或智慧交通系統的理想工具。
二、快速上手:使用 LaneSOD 的流程概覽
以下以 Python + PyTorch 環境為基礎,簡述流程步驟:
安裝依賴與下載模型:
git clone https://github.com/plemeri/LaneSOD.git
cd LaneSOD
pip install -r requirements.txt
資料準備與推論:
from lanesod import LaneSODModel
model = LaneSODModel(pretrained=True)
# 載入測試影像
img = load_image("road_scene.jpg")
mask = model.predict(img)
save_image_mask("road_scene_mask.png", mask)mask 是二值化輸出,車道線處為前景。
可進行後處理(edge filtering)提升視覺辨識效果。
三、LaneSOD 的特色亮點
- 高解析度精準分割:繼承 InSPyReNet 的頂尖顯著性分析能力,即使複雜場景仍保持高精度。
- 簡易套件整合:支援 CLI 和 Python API,開發者可快速整合至專案。
- 應用靈活性高:適用於單張圖片、影片逐幀處理或即時影像分析。
- MIT 開源授權:自由使用並可擴展至商業應用。
四、實戰建議
- 強調後處理:可搭配 OpenCV 做 morphological operations(如 dilation, erosion)強化車道線連貫性。
- 影片整合:巡迴處理影片每幀、並套用 temporal smoothing,可提升邊界一致性與視覺效果。
- 多元測試場景:建議在白天、夜晚、陰影等多樣環境下測試模型穩定性。
原始資料
https://github.com/plemeri/LaneSOD
by Rain Chu | 2 月 15, 2023 | 數據分析
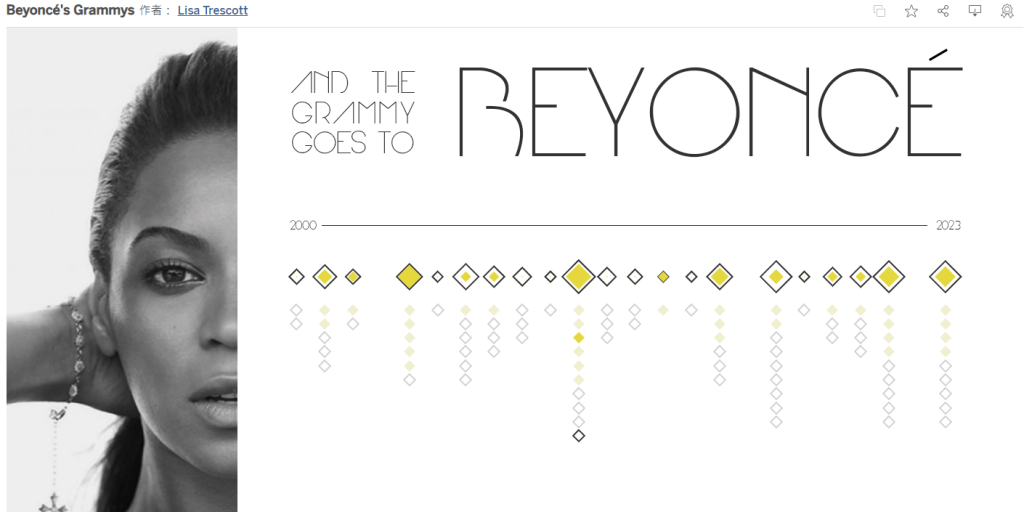
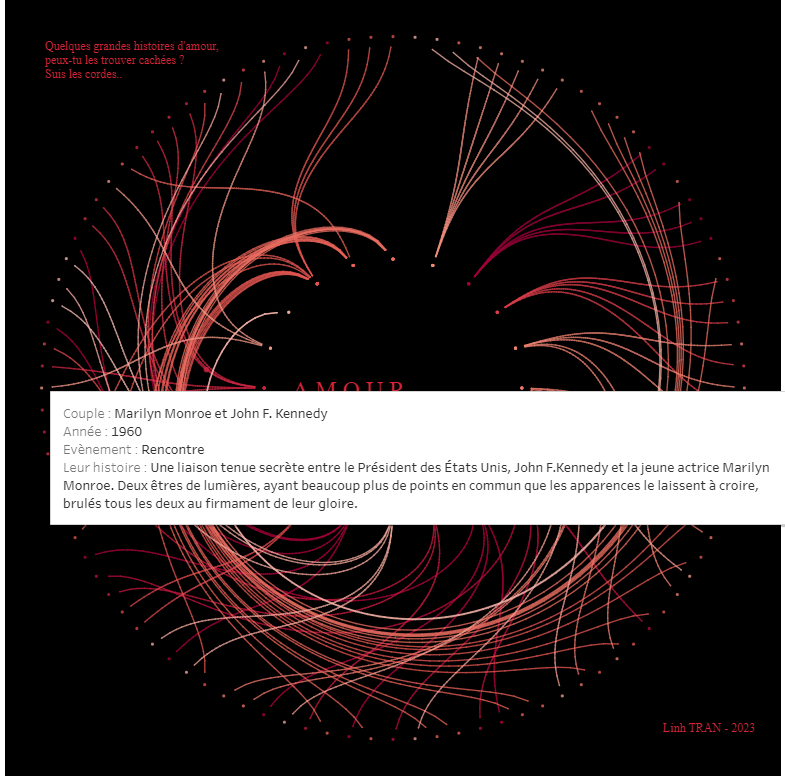
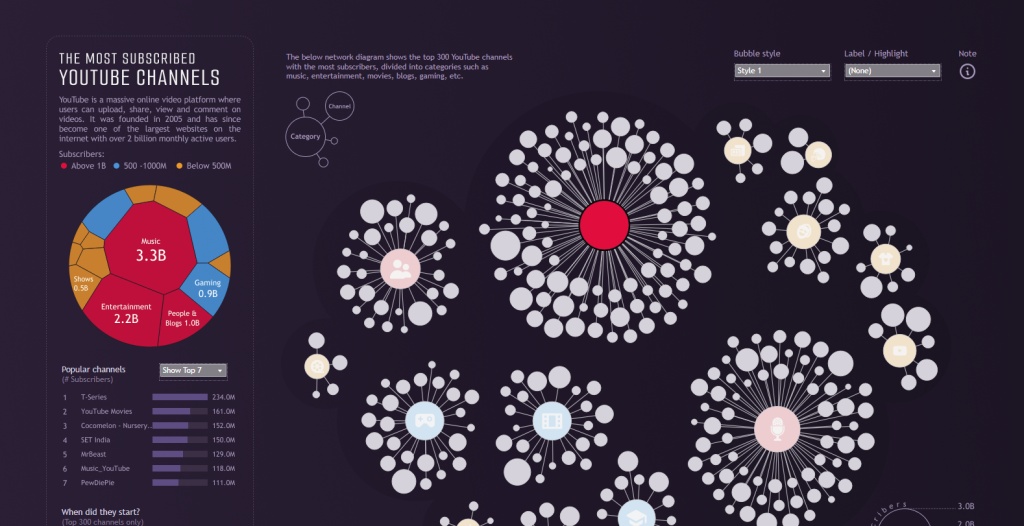
美美的數據總是跟美女一樣,特別的吸引人們的目光,我們想要說服客戶、老闆、愛人?當然也是要有超美的圖表以及超強的數據分析能力來證明自己甚麼都行,除了PowerPoint、Keynote,還有今天要介紹的 Tableau
先來幾個視覺衝擊,絕對想不到這些是超美的數據表格
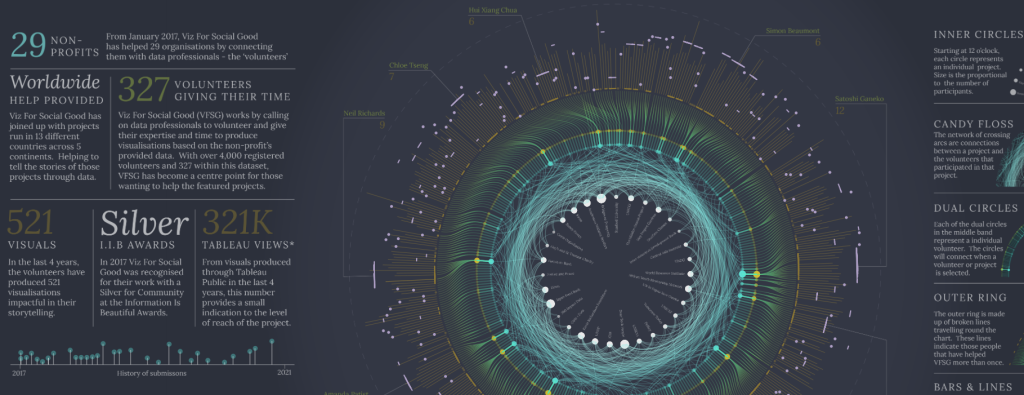
免費版本的 Tableau
https://public.tableau.com/
功能幾乎沒有限制,有離線版本和線上版本,可以下載到自己的電腦中使用,唯一要求就是要公開自己的創作
付費進階版本的 Tableau
https://www.tableau.com/
全功能,全產品線的資料分析工具程式,可以結合CRM,可以擁有自己的 Server,在數據呈現方面,面面俱到,幾乎無所不能
Tableau 的中文教學影片
訂閱每日視覺效果的衝擊
https://public.tableau.com/app/viz-of-the-day/subscribe
近期留言